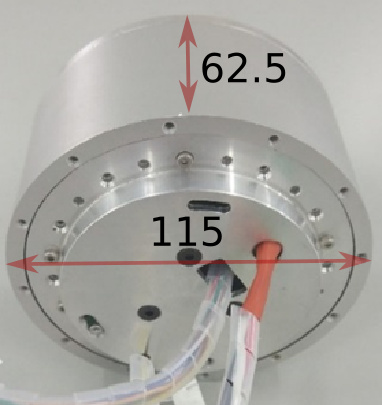
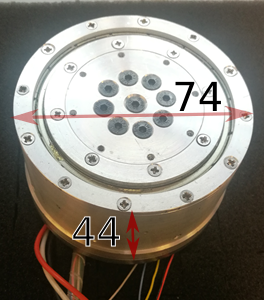
The axo-aider has developed the second prototype of assistive exoskeleton to provide sit-to-stand and load carrying/lifting assistances. The exoskeleton was built with the state-of-the-art actuating and sensing technologies and work intelligently and safely. Weighted only 5 kg and assist with maximum 50 Nm at arm, the exoskeleton can be used easily and comfortable at home for the elderly and at workplaces for workers. The exoskeleton is currently being tested at labs. Field tests are being planned in next phase.

All comments and feedback are welcome. Feel free to contact us for trial and collaborations.
Contact: Shaoping Bai, shb@mp.aau.dk